Generates a new distribution by applying a link transformation to an existing
distribution dist. If \(X \sim \text{dist}\) and \(h\) is the link function,
this function returns the distribution of \(Y = h^{-1}(X)\).
The CDF \(F_Y\), quantile function \(Q_Y\), PDF \(f_Y\), and RNG \(R_Y\)
of the transformed distribution are derived from the original distribution's
functions \(F_X\), \(Q_X\), \(f_X\), \(R_X\) and the link function \(h\)
and its inverse \(h^{-1}\) as follows:
$$
F_Y(y) = F_X(h(y))
$$
$$
Q_Y(p) = h^{-1}(Q_X(p))
$$
$$
f_Y(y) = f_X(h(y)) \cdot |h'(y)|
$$
$$
R_Y(n) = h^{-1}(R_X(n))
$$
where \(h'(y)\) is the derivative of the link function. This function implements
these transformations for the p, q, d, and r functions of the resulting
dist_fns object.
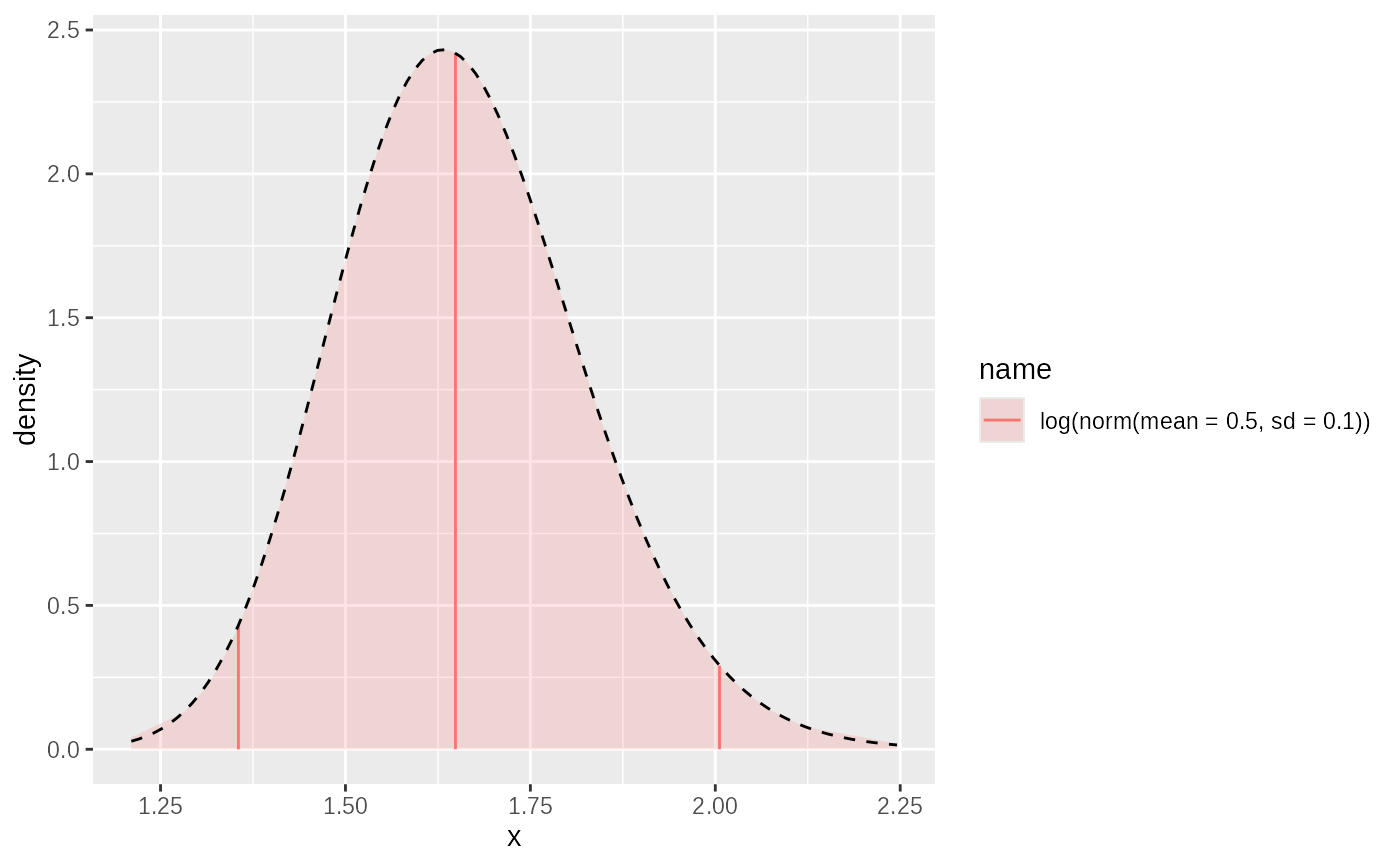
Examples
n = as.dist_fns("norm",mean=0.5, sd=0.1)
t = transform("log",n)
plot(t)+ggplot2::geom_function(fun=~ dlnorm(.x, 0.5, 0.1), linetype="dashed")